
Overview
I joined the RoboMaster team at college in my sophomore year to participate in the prestigious RoboMaster competition. Afterwards, I was honored to serve as the head of Deep Learning Group in Vision Sector, leading the group to design high-precision real-time automatic recognition and aiming systems for our team’s combat robots.
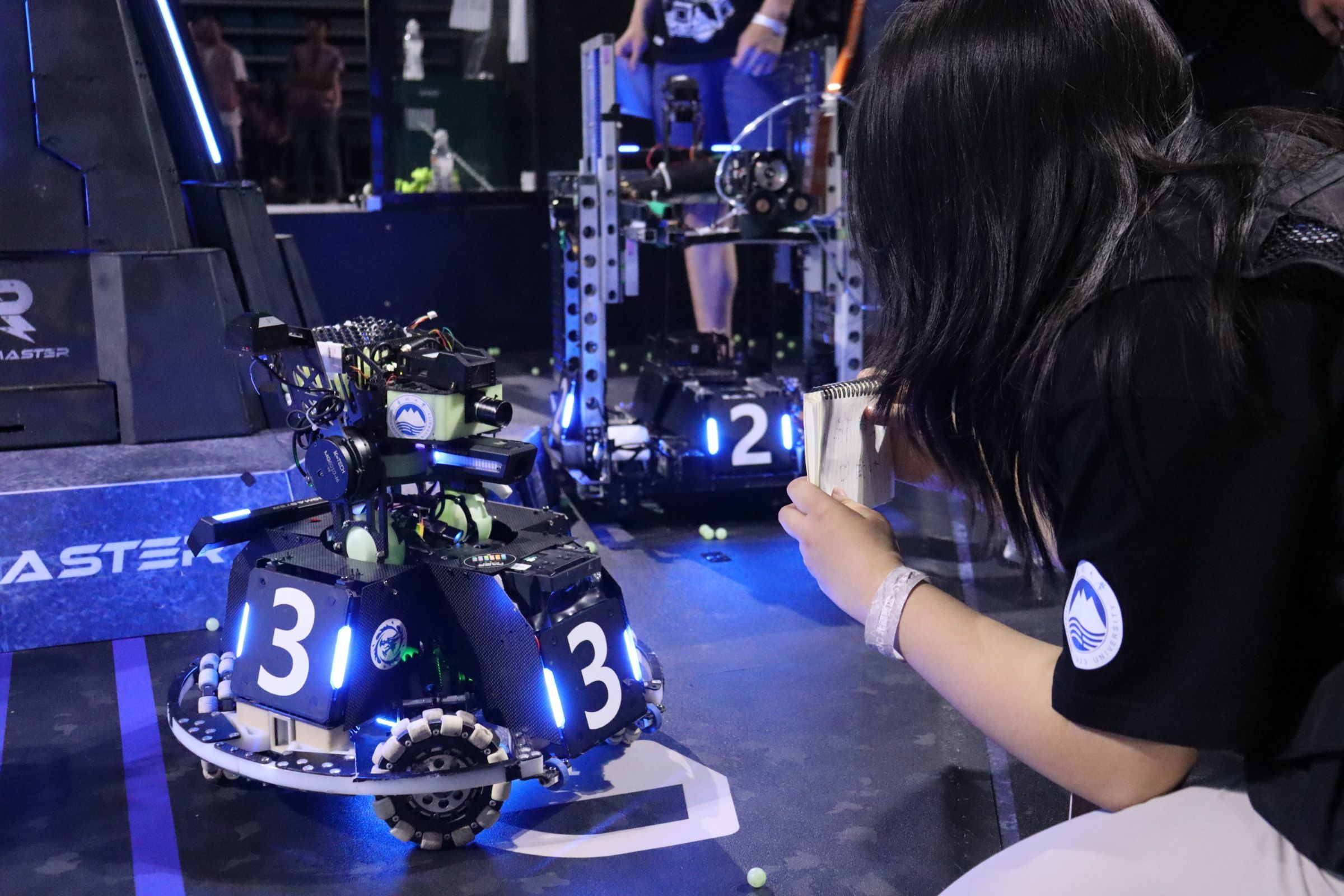
Technical Highlights
- Collected and analyzed datasets of armor plates, and developed scripts for datasets processing.
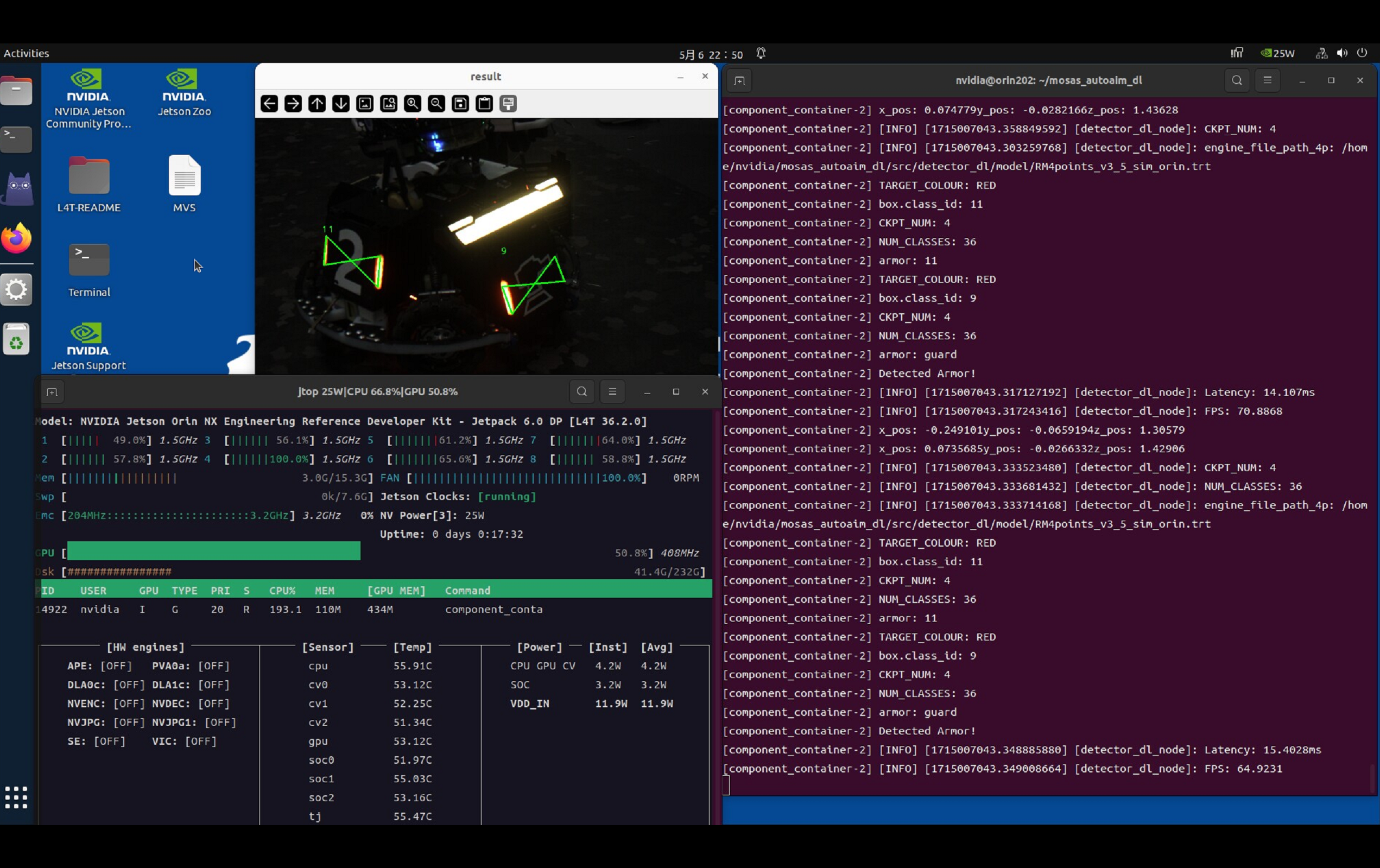
- Studied object detection models such as YOLO, customized yolov5-face into a four-keypoint model, and introduced Normalized Mean Error metric to optimize and enhance the model’s performance.
- Deployed the model using C++ and ROS2 framework, leveraged CUDA and TensorRT libraries to accelerate model inference speed on NVIDIA Jetson series edge development boards.
Skills
- Programming Languages: C++, Python, CUDA
- Frameworks: OpenCV, ROS, Pytorch
- Hardware: NVIDIA Jetson
- Sensors: Cameras
Competition Results
- 2024.08 🥉 National Third Prize — 23rd National RoboMaster Competition.
- 2023.08 🥉 National Third Prize — 22nd National RoboMaster Competition.
This period was the most unforgettable and rewarding experience during my undergraduate years. I grew rapidly in the team and learned a lot in computer science, robotics, and artificial intelligence. I am grateful for the opportunity to be part of such a great team and work together!